DexGraspNet: A Large-Scale Robotic Dexterous Grasp Dataset for General Objects Based on Simulation
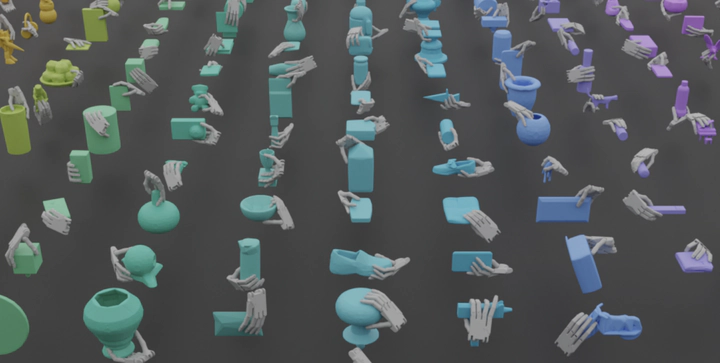 Teaser for GenDexGrasp
Teaser for GenDexGrasp
Abstract
Object grasping using dexterous hands is a crucial yet challenging task for robotic dexterous manipulation. Compared with the field of object grasping with parallel grippers, dexterous grasping is very under-explored, partially owing to the lack of a large-scale dataset. In this work, we present a large-scale simulated dataset, DexGraspNet, for robotic dexterous grasping, along with a highly efficient synthesis method for diverse dexterous grasping synthesis. Leveraging a highly accelerated differentiable force closure estimator, we, for the first time, are able to synthesize stable and diverse grasps efficiently and robustly. We choose ShadowHand, a dexterous gripper commonly seen in robotics, and generated 1.32 million grasps for 5355 objects, covering more than 133 object categories and containing more than 200 diverse grasps for each object instance, with all grasps having been validated by the physics simulator. Compared to the previous dataset generated by GraspIt!, our dataset has not only more objects and grasps, but also higher diversity and quality. Via performing cross-dataset experiments, we show that training several algorithms of dexterous grasp synthesis on our datasets significantly outperforms training on the previous one, demonstrating the large scale and diversity of DexGraspNet. We will release the data and tools upon acceptance.